Inspired by natural swimmers such as bacteria, artificial microswimmers hold great potential in becoming controllable agents of micro world. These swimmers can be used in targeted drug delivery, minimally invasive surgery and manipulative agents in microsystems such as lab-on-a-chip devices. Magnetic field is the most preferred actuation mechanism as it allows for in vivo applications. Magnetic actuation has its own setbacks, such as oscillatory trajectories in confinement and step-out.
Current Interests
Part of our research is on microswimmers with helical tails. Experiments are conducted with micrometer-scale swimmers that are produced with self-scrolling method. The swimmers are magnetized by a Ni layer sandwiched in-between two silicon nitride layers. The swimmers are propelled by a rotating magnetic field inside channels and reservoirs. The trajectories, velocities and orientations of the swimmer are extracted using image processing tools. The change in extracted parameters is investigated with respect to channel size and type, rotation rate of the magnetic field, direction of propulsion and acoustic vibration.
Video of a millimeter-scale swimmer being pushed back and forth by a pair of acoustic transducers by changing the excitation frequency.
Alongside the experimental studies, effects of the acoustic fields on microswimmers are modeled with different methodologies. Computationally efficient models such as the chain-of-spheres approach are utilized alongside the computationally expensive finite-element methodologies to evaluate the acoustic radiation force on helical structures. The approach is used for the evaluation of the acoustic radiation force on other intricate structures such as rings.
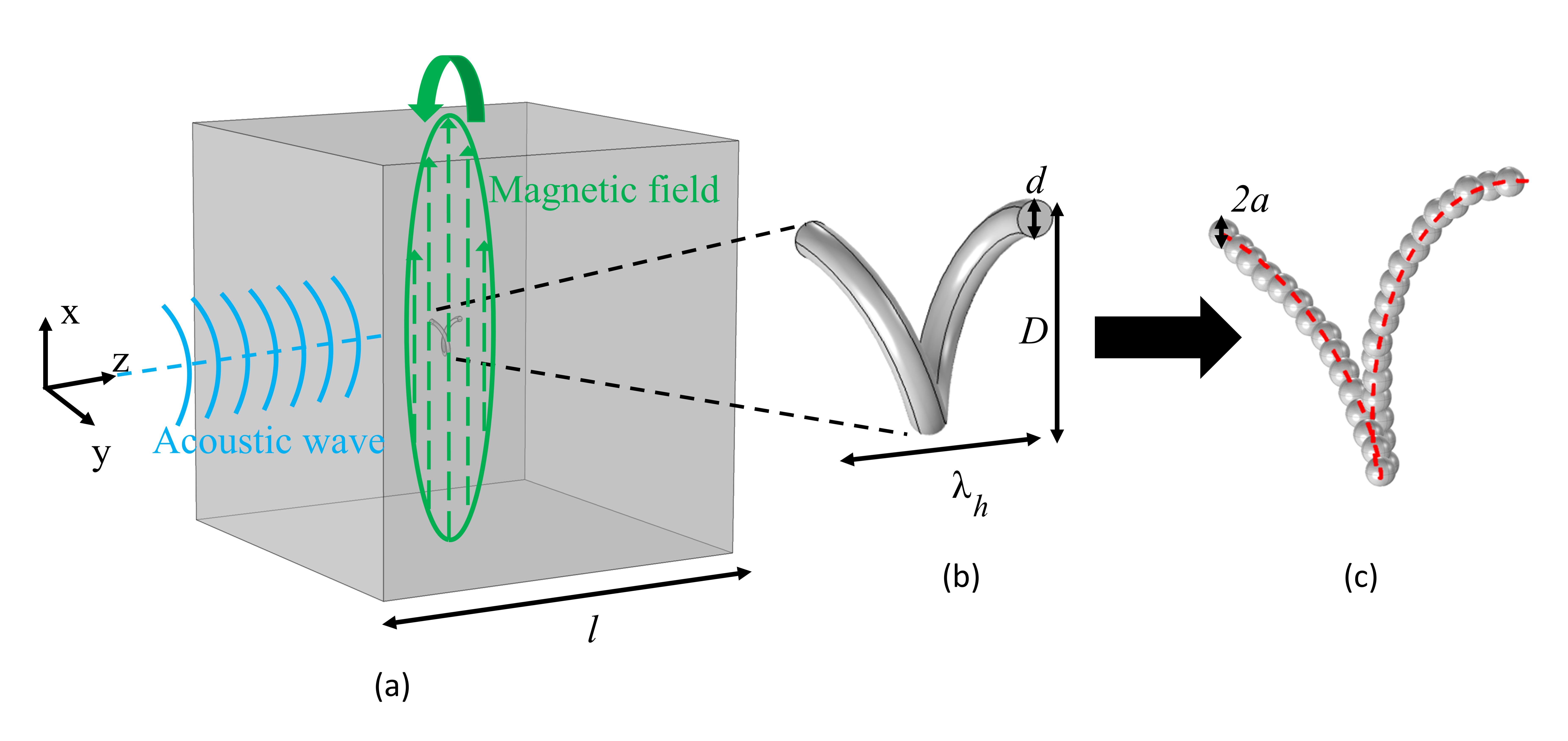
The depiction of the chain-of-spheres approach, as reported in Caldag & Yesilyurt (2020)
We utilize our microrobotic knowledge to study fundamental physics problems as well. Currently we are investigating the acoustic radiation forces on rings and implementing the chain-of-spheres approach to evaluate the radiation forces. We are also looking into the motion of rotating spheres and cylinders in confined environments. In our study on spheres, we looked into the rolling and sliding of rotating spheres that is manifested by the pressure buildup between the fore and aft of the sphere. We also carried out another study with cylindrical magnets in which machine learning algorithms are exploited in developing an offline control algorithm for accurate navigation of cylindrical magnets.
Experiment video showing a magnetically rotated sphere. The sphere moves in the axial direction while rotating.
The trajectory of a helical swimmer inside confinement, series of images collected from a series of simulations carried out on Comsol (Check Caldag and Yesilyurt (2019) for further details.)
Future Interests
Our future interests include:
- Experiments on micron-scale swimmers with acoustic and magnetic fields together
- Incorporating the acoustic interaction forces between the parts of an intricate structure on chain-of-spheres methodology
- Evaluation of acoustic radiation force in viscous fluids with chain-of-spheres approach
- Modulating the magnetic field navigate the swimmer along a desired path or perform various actions
- Investigation of swimming in fluid-fluid interfaces.
- Application of machine learning tools for controlled navigation of microswimmers